




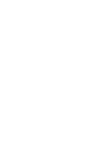
[ICCV 2023] Learning Foresightful Dense Visual Affordance for Deformable Object Manipulation
In this paper, we study deformable object manipulation using dense visual affordance, with generalization towards diverse states, and propose a novel kind of foresightful dense affordance, which avoids local optima by estimating states' values for long-term manipulation.
Oct 23 / 2023 Read More >-
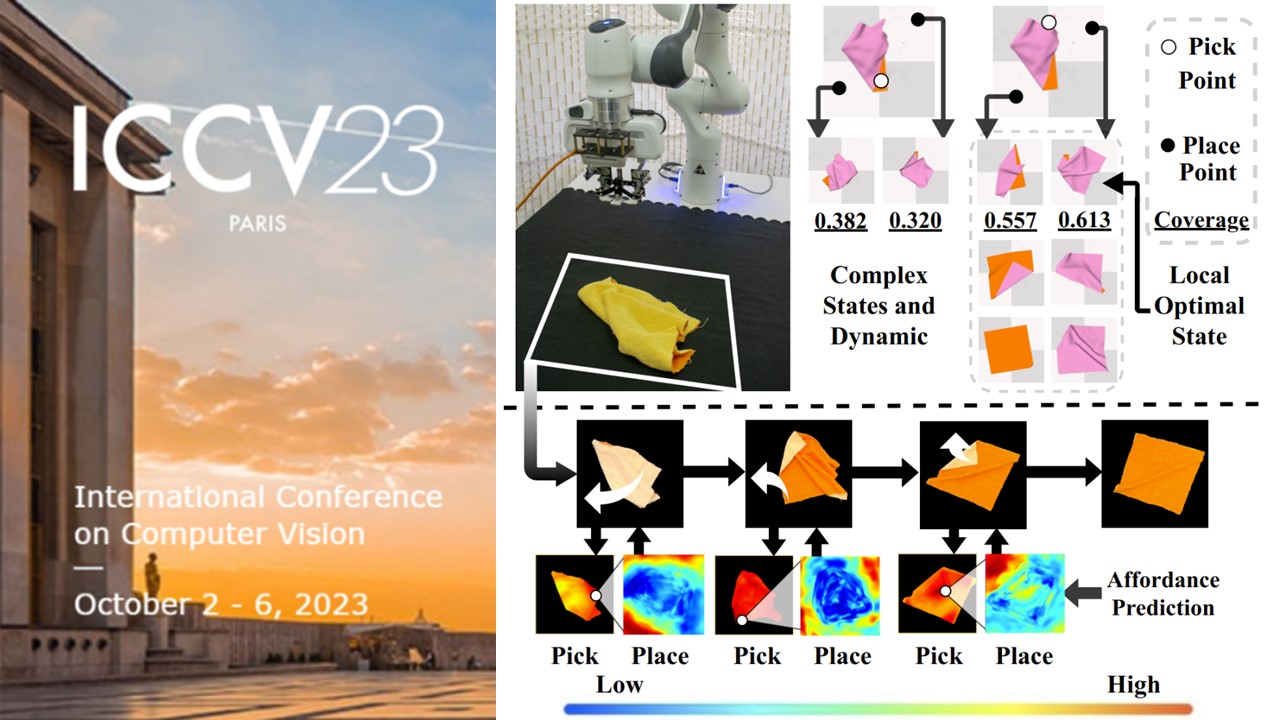
 [ICCV 2023 Oral] UniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning
Aug
17, 2023
[ICCV 2023 Oral] UniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning
Aug
17, 2023
-
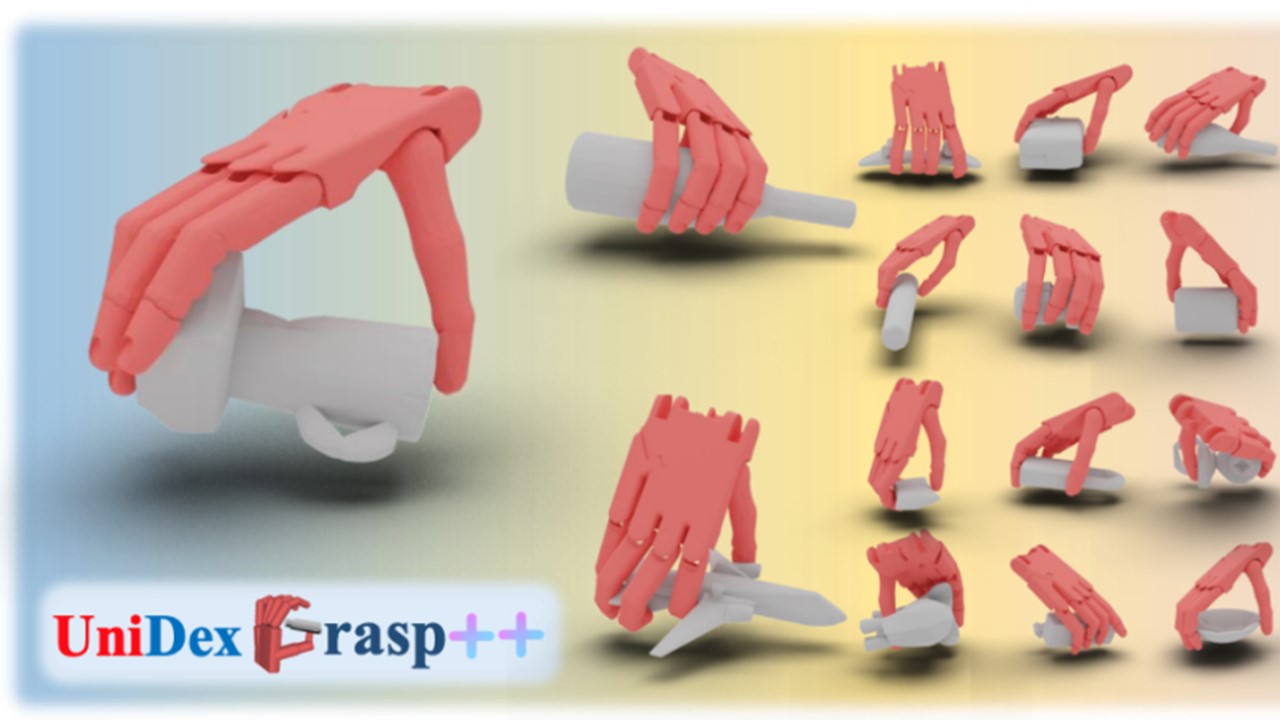
 [ICML 2023] Which Invariance Should We Transfer? A Causal Minimax Approach
Aug
15, 2023
[ICML 2023] Which Invariance Should We Transfer? A Causal Minimax Approach
Aug
15, 2023
-
 [ICML 2023] Coordinated Dynamic Bidding in Repeated Second-Price Auctions with Budgets
Jul
21, 2023
[ICML 2023] Coordinated Dynamic Bidding in Repeated Second-Price Auctions with Budgets
Jul
21, 2023
-
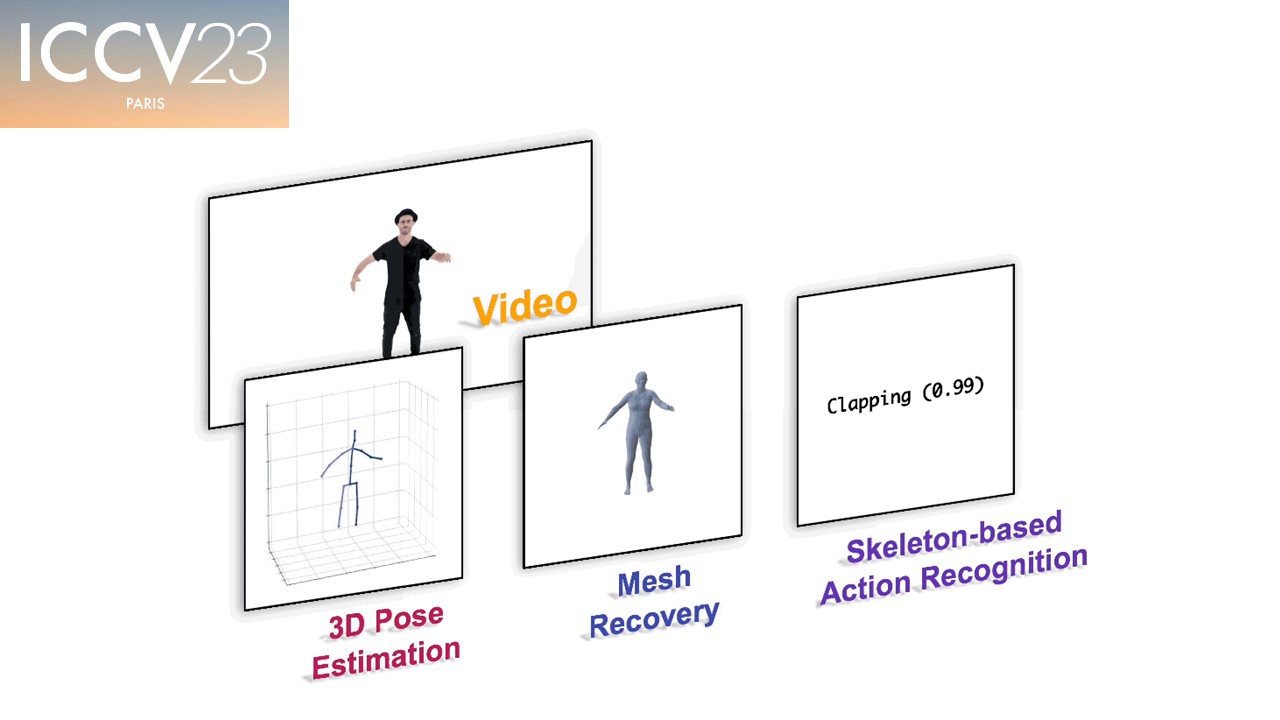 [ICCV 2023] MotionBERT: A Unified Perspective on Learning Human Motion Representations
Jul
18, 2023
[ICCV 2023] MotionBERT: A Unified Perspective on Learning Human Motion Representations
Jul
18, 2023





- CFCS Invited Talks
Mutator Set: a Scalable Cryptographically Authenticated Data Structure for Private UTXOs
Speaker: Dr. Alan Szepieniec, Neptune
Host: Dr. Tianren Liu
Time: 2023-11-17 16:00
Venue: Room 204, Courtyard No.5, Jingyuan
- CFCS Invited Talks
Coordination on Multilayer Networks
Speaker: Prof. Junjie Zhou, Tsinghua University
Host: Dr. Yuqing Kong
Time: 2023-11-15 10:00
Venue: Room 204, Courtyard No.5, Jingyuan
- 2023-10-26 A Quantum Approach for Reducing Communications in Classical Cryptographic Primitives CFCS Youth Talks
- 2023-10-25 A Reduction from Chores Allocation to Job Scheduling CFCS Youth Talks
- 2023-10-20 Language Model for Biological Data CS Peer Talks
- 2023-10-19 Full-System Evaluation of the sPIN In-Network-Compute Paradigm CS Peer Talks